


Datenbus-Systeme werden schon seit einigen Jahrzehnten im Pkw verwendet. Doch die Technik in modernen Fahrzeugen ist zu einem umfangreichen Netzwerk herangewachsen. Nur mit dieser enormen und schnellen Rechnerleistung sind heutige Anforderungen an einen Pkw möglich. Die Beibehaltung der konventionellen Technologie ohne solche Netze für die elektrische Anlage hätte zur Folge, dass:







► Die Anzahl der elektrischen Leitungen extrem hoch wäre.
► Eine hohe Anzahl an elektrischen Leitungen das Risiko von Störstellen erhöhte.
► Viele elektrische Leitungen zu höherem Gewicht und höheren Kosten führten.
Durch die Einführung des Datenbus-Systems ist es möglich, dass:
► Die am Datenbus-System angeschlossenen Steuergeräte mit dem Diagnosetester kommunizieren.
► Die am Datenbus-System angeschlossenen Steuergeräte untereinander kommunizieren.
► Die Anzahl der elektrischen Leitungen deutlich reduziert werden kann.
Verschiedene Datenbus-Systeme
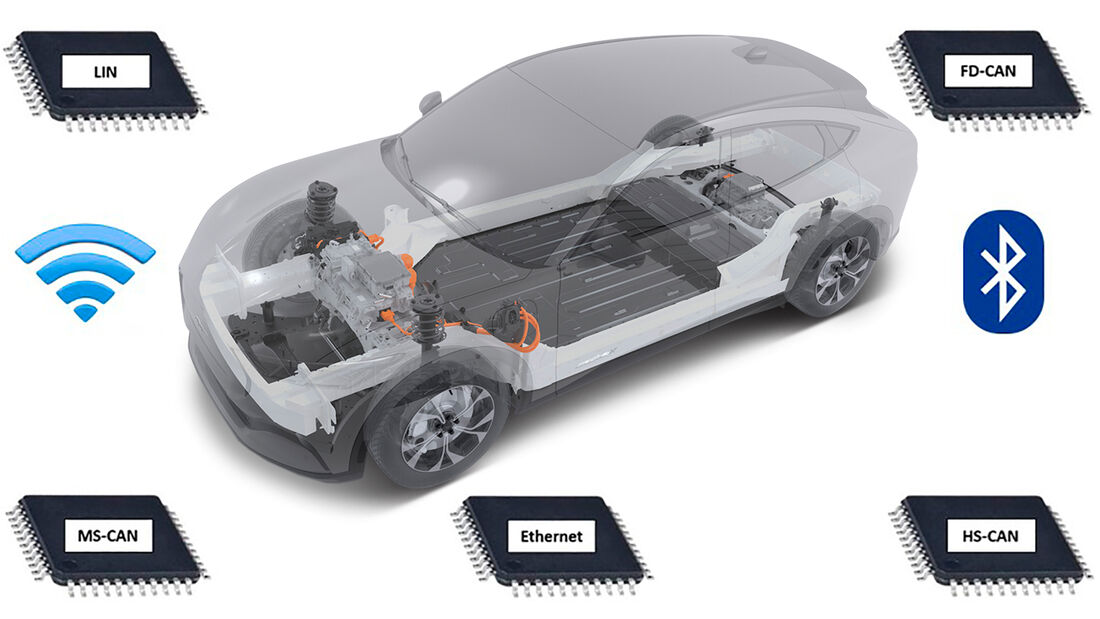
Der Ford Mustang Mach-E ist mit folgenden Kommunikations-Systemen ausgestattet:
► CAN
– Datenbus-System mit zwei Kommunikationsleitungen
– Hohe Übertragungsgeschwindigkeiten.
– Dient zur Kommunikation der angeschlossenen Steuergeräte untereinander.
– Dient zur Diagnose einzelner Steuergeräte mit dem Diagnosetester.
– Verschiedene Übertragungsgeschwindigkeiten (FD-CAN, HS-CAN, MS-CAN).
► LIN
– Datenbus-System mit einer Kommunikationsleitung.
– Wird für einfachen Datenaustausch zwischen Steuergeräten und einem oder mehreren Sensoren bzw. Stellgliedern verwendet.
► Ethernet
– Datenübertragung mit einem ungeschirmten Twisted-Pair-Kabel.
– Es können Daten mit bis zu 100 Mbit/s übertragen werden.
– Es ermöglicht die Übertragung von Audio-, Video-, Connected-Car-, Firmware-/Software- und Kalibrierungsdaten in Autos.
► Bluetooth
– Bluetooth ist ein Industriestandard, der zwei Geräte drahtlos verbindet und Daten austauscht.
– Bluetooth wird verwendet, um das Smartphone mit dem Multimediasystem zu verbinden.
– Bluetooth 5.0 hat Übertragungsraten von 2 Mbit/s im Low Energy Modus und sogar 3 Mbit/s mit Enhanced Data Rate (EDR), bei einer Reichweite bis zu 200 Meter. Im Normalmodus sind bis zu 50 Mbit/s möglich.
► OTA
– Over-the-Air-Aktualisierungen ermöglichen die drahtlose Aktualisierung der Fahrzeugsoftware über WLAN und das Mobilfunknetz des Fahrzeugs.
Datenübertragung
Die Datenübertragung erfolgt digital, d. h. alle Daten (Buchstaben, Zahlen, Töne, Bilder usw.) werden für die Verarbeitung im Computer in einen binären Code umgewandelt. Das Binärsystem ist das gebräuchlichste Zahlensystem in der Datenverarbeitung (siehe Info am Ende des Artikels), da es nur zwei Zustände kennt: 0 und 1 bzw. gesetzt und nicht gesetzt.
Nimmt man eine bestimmte Zeit und teilt diese in kleine Zeitfenster ein, so kann man für die Dauer eines solchen Zeitfensters eine definierte Spannung (z. B. 3,5 Volt) auf einer elektrischen Leitung schalten. Beispielsweise bedeutet 3,5 V "High-Pegel" und 0 V "Low-Pegel", d. h. es gibt zwei Schaltzustände.
Das oben genannte Zeitfenster wird als Bit bezeichnet (engl.: Binary Digit = kleinste Informationseinheit). Da ein Bit nur zwei Bedeutungen haben kann, werden acht Bits zu einem Block zusammengefasst und als Byte bezeichnet.
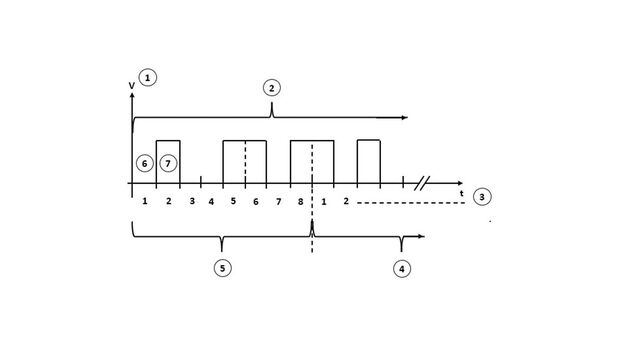
Digitale Datenübertragung. 1 Signalspannung, 2 Bits, 3 Zeitachse, 4 2. Byte, 5 1. Byte, 6 Bit nicht gesetzt (logisch „0“), 7 Bit gesetzt (logisch „1)
Mit einem Byte können 256 Zeichen kodiert werden.
Gebräuchliche Bezeichnungen für Einheiten von Bytes:
8 bit = 1 Byte
► 1 Kilobyte (KB) = 1024 Bytes
► 1 Megabyte (MB) = 1024 KB (1 048 576 Bytes)
► 1 Gigabyte (GB) = 1024 · 1024 · 1024 Bytes, also 1024 MB
Vernetzung der Steuergeräte
Um den Datenaustausch zwischen den Steuergeräten zu ermöglichen, müssen diese elektrisch miteinander verbunden sein. Jedes Steuergerät kann auf einem Leitungspaar Daten senden und empfangen. Dies geschieht seriell, d. h. die einzelnen Bits werden nacheinander auf die Leitungen des Datenbusses gesendet und auch so wieder ausgelesen.
Nachfolgend ein Beispiel für das Senden und Empfangen von Meldungen zwischen Steuergeräten.
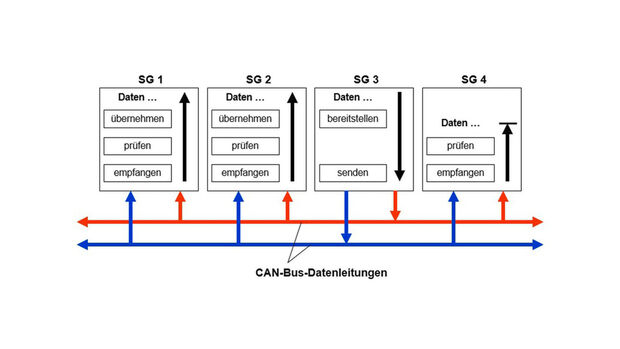
Jeder Teilnehmer kann sich die Daten nehmen, die er benötigt. Wenn ein Teilnehmer wichtigere Daten sendet, hat er Vorrang. Er überschreibt damit die weniger wichtigen Daten der anderen Teilnehmer
Das Steuergerät 3 (SG 3) liefert die Information "Kühlmitteltemperatur" und stellt sie auf den Bus. Alle anderen Steuergeräte (SG) empfangen diesen Datensatz und prüfen, ob sie den Temperaturwert für sich verwenden können. Die Kühlmitteltemperaturanzeige im Kombi-Instrument (SG 1) zeigt dem Fahrer die aktuelle Motortemperatur, während die Klimaanlage (SG 2) daraus ableitet, dass noch Reserven zur weiteren Abkühlung der Innenraumluft vorhanden sind.
Zweidrahtbus-Systeme
Zweidrahtbus-Systeme bestehen aus zwei miteinander verdrillten Kupferleitungen. Durch die Verdrillung der Leitungen wird die elektromagnetische Verträglichkeit verbessert. Zweidrahtbus-Systeme haben eine hohe Datenübertragungsrate. Ein Spannungspegel auf einer Leitung geht nach oben (CAN-High), der andere Spannungspegel geht nach unten (CAN-Low). Im Folgenden werden die im Ford Mustang Mach-E verwendeten Zweidrahtbus-Systeme vorgestellt.
CAN-Bus
CAN (Controller Area Network) wurde ursprünglich in den 1980er-Jahren von der Robert Bosch AG speziell für den Einsatz im Automobilbereich als kostengünstige Vernetzungslösung entwickelt. Das CAN-Datenbus-System besteht aus zwei verdrillten Adern (Twisted-Pair-Leitungen mit 33 bis 50 Verdrillungen/m).
In seiner Weiterentwicklung gibt es CAN-Datenbusse mit unterschiedlichen Übertragungsgeschwindigkeiten. Derzeit werden in Ford-Fahrzeugen FD-CAN (Flexible-Data-CAN), HS-CAN (High-Speed-CAN) und MS-CAN (Mid-Speed-CAN) eingesetzt.
Die Übertragungsrate beträgt:
► MS-CAN 125 kbit/s
► HS-CAN 500 kbit/s
► FD-CAN bis zu 2 Mbit/s
Hinweis: Alle eingesetzten CAN-Bus-Systeme besitzen keine Notlaufeigenschaften (Non-Fault Tolerant CAN). Wird auf einer der beiden Leitungen nicht mehr gesendet, so ist der Bus ohne Kommunikation.
Spannungspegel CAN-Bus
Der Spannungspegel der eingesetzten CAN-Bus-Systeme beträgt im Ruhezustand (= rezessiv) auf beiden Leitungen ca. 2,5 V. Im dominanten Zustand steigt der Pegel bei CAN-High auf ca. 3,5 V, während er bei CAN-Low auf ca. 1,5 V fällt (Differenzspannung ca. 2 V).
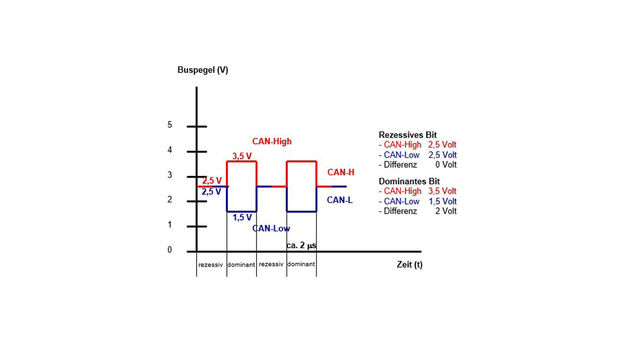
Spannungsverläufe CAN-Bus
Bei einer Spannungsdifferenz zwischen CAN-High und CAN-Low von mindestens 0,9 Volt spricht man von einem dominanten Buspegel.
Hinweis: Es gibt Steuergeräte, die den Bus wachhalten oder aufwecken können, Steuergeräte, die wach bleiben, bis sie die Sleep-Meldung erhalten und Steuergeräte, die direkt nach dem Abschalten in den Sleep-Modus gehen. Aus diesem Grund sollte der CAN-Bus bei erhöhtem Ruhestrom immer überprüft werden.
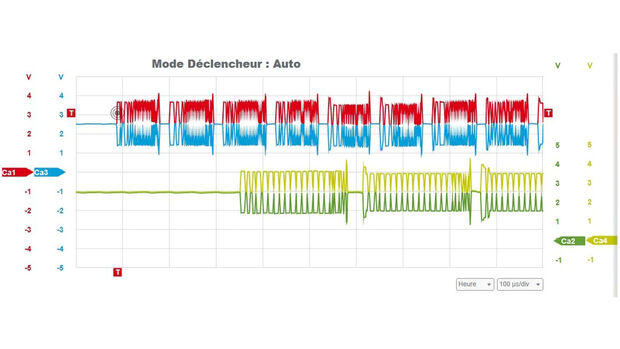
CAN-Signale
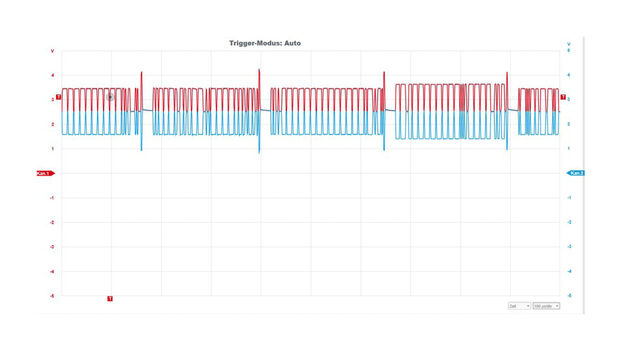
Spannungsverlauf im HS-CAN. Die CAN-Signale im High-Speed- und im Mid-Speed-Bus unterscheiden sich nur in der Übertragungsgeschwindigkeit
Das Bild zeigt einen HS-CAN, der mit dem Oszilloskop aufgezeichnet wurde. CAN-Nachrichten werden in Blöcken gesendet. Am Ende einer Nachricht wartet das sendende Steuergerät darauf, dass der oder die Empfänger den Erhalt der Nachricht bestätigen. Dies geschieht durch das Senden eines dominanten Bits. Dieses von den Empfängern gesendete Bit wird als Acknowledge-Signal bezeichnet und ist immer das letzte dominante Bit in einer Nachricht. Da alle Steuergeräte dieses Signal senden, sobald sie die Nachricht korrekt empfangen haben, ist das letzte Bit in der Regel etwas höher.
Abschlusswiderstände
Elektrisch gesehen hat ein stromdurchflossener Leiter immer einen ohmschen, induktiven und kapazitiven Widerstand. Je höher die Übertragungsfrequenz ist, desto größer sind die induktiven und kapazitiven Widerstände. Dies kann dazu führen, dass am Ende der Übertragungsleitung ein nicht mehr identifizierbares Signal zur Verfügung steht. Aus diesem Grund werden die beiden Busleitungen (CAN-High und CAN-Low) über zwei Abschlusswiderstände mit je 120 Ohm physikalisch miteinander verbunden.
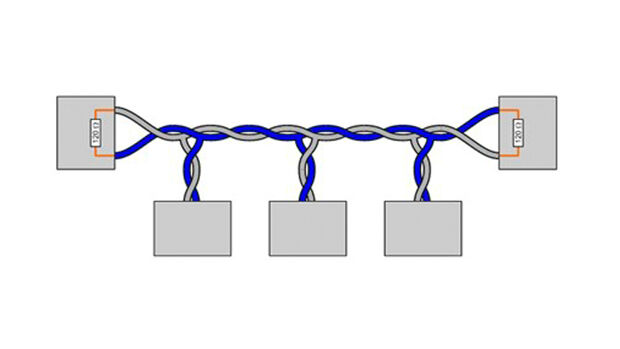
Die beiden Enden der CAN-Bus-Leitung müssen jeweils mit einem eigenen Abschlusswiderstand „terminiert“ werden. Dadurch wird die Signalqualität verbessert, was höhere Übertragungsgeschwindigkeiten ermöglicht
Die Abschlusswiderstände sind in den am weitesten voneinander entfernten Steuergeräten eingebaut.
Der Gesamtwiderstand, der sich aus der Parallelschaltung der beiden 120-Ω-Wider-stände ergibt, beträgt ca. 60 Ω. Der Gesamtwiderstand kann mit einem Multimeter zwischen CAN-High und CAN-Low gemessen werden. Die jeweiligen Einbauorte der Abschlusswiderstände können dem entsprechenden Topologieplan bzw. Schaltplan entnommen werden.
FD-CAN
FD-CAN (flexible Datenrate) ist eine Erweiterung des "klassischen" CAN-Busses. FD-CAN erlaubt zum einen die Übertragung einer größeren Datenmenge, die Grenze von acht Byte bei MS-CAN und HS-CAN wurde bei FD-CAN auf 64 Byte erweitert. Außerdem erreicht FD-CAN einen viermal höheren Datendurchsatz als HS-CAN.
Die beiden Enden der CAN-Bus-Leitung müssen jeweils mit einem eigenen Abschlusswiderstand „terminiert“ werden. Dadurch wird die Signalqualität verbessert, was höhere Übertragungsgeschwindigkeiten ermöglicht
Die Spannungspegel der High- und Low-Signale sind identisch mit denen des MS-CAN und HS-CAN.
Gateway
Das Gateway-Steuergerät ist die Schnittstelle zwischen den verschiedenen Datenbus-Systemen und stellt gleichzeitig die Verbindung zur Außenwelt her.
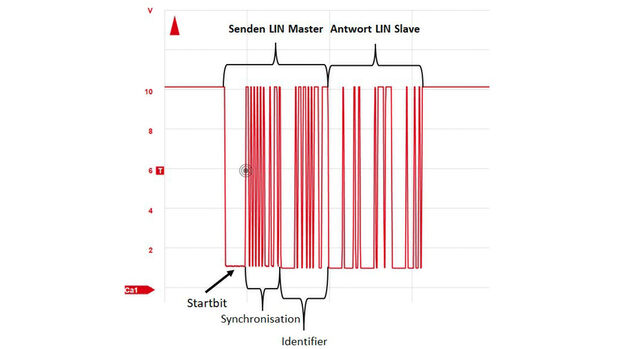
Oszillogramm einer LIN-Botschaft. Bei Ford hat der LIN-Bus einen Spannungspegel zwischen 1 und 10 Volt
Die einzelnen Bus-Systeme senden ihre Daten an das Gateway. Dadurch wird sichergestellt, dass die systemübergreifenden Daten trotz unterschiedlicher Kommunikationsstrukturen und -geschwindigkeiten im gesamten Systemverbund zur Verfügung stehen.
Eindrahtbus-Systeme
Wie der Name schon sagt, wird bei Eindrahtbus-Systemen nur eine Leitung für die Datenübertragung verwendet. Deshalb ist die Störanfälligkeit höher und die Datenübertragungsgeschwindigkeit begrenzt. Der Ford Mustang Mach-E verwendet den LIN-Bus als Eindrahtbus.
LIN-Bus
Der LIN-Bus wurde als Standard-Netzwerk für die Automobilindustrie entwickelt. LIN steht für Local Interconnect Network und besteht aus folgenden Komponenten:
► Übergeordnetes Steuergerät (Master)
► Untergeordnete Steuergeräte (Slave)
► Eindrahtleitung (Kupfer)
Beim LIN-Bus dient eine bidirektionale Eindrahtbus-Leitung als Übertragungsmedium und wird dort eingesetzt, wo die Bandbreite und Vielseitigkeit von CAN nicht benötigt wird. Der LIN-Bus hat eine Datenübertragungsrate von 9,6 kBit/s bis 19,2 kBit/s.
Im Ford Mustang Mach-E kommen mehrere LIN-Bus-Systeme zum Einsatz. Die einzelnen LIN-Busse sind in der Regel einem System zugeordnet, beispielsweise im Karosserie-Steuergerät (BCM) für die Ambiente-Beleuchtung und Batterieüberwachungs-Sensor (BMS), im ADAS-Steuergerät für die Ultraschallsensoren, im Bluetooth-Low-Steuergerät (BLEM) für die Bluetooth-Antennen, in den Türsteuergeräten für die Fensterheber etc.
LIN-Signale
Durch die Festlegung von Sende- und Empfangstoleranzen im Bereich des rezessiven und dominanten Signals wird eine stabile Datenübertragung im Gesamtsystem gewährleistet.
Eine LIN-Nachricht besteht aus dem Startbit, das allen Slave-Steuergeräten den Beginn einer neuen Nachricht signalisiert. Die Synchronisation ist eine Bitfolge zur Einstellung der Bit-Zeit in allen Knoten, sodass die Nachricht fehlerfrei gelesen werden kann. Der Identifier ist eine Nummer zur eindeutigen Identifizierung der Nachricht. Anhand des Identifiers erkennt der entsprechende Slave, ob diese Nachricht für ihn bestimmt ist. Und schließlich das Datenfeld, das die Antwort enthält.
Der Bereich bis zum Identifier wird als "Header" bezeichnet und wird immer vom Master-Steuergerät gesendet. Die "Response" enthält die Nutzdaten und die Prüfsumme zur Kontrolle der Übertragungsqualität sowie die Information über die angeforderten Daten.
Ethernet-Kommunikation
Die zunehmende Anzahl und die Komplexität der Funktionen im Fahrzeug führen zu einer stetigen Zunahme der Steuergeräte und damit der Datenmenge im Fahrzeug. Diese Steuergeräte müssen bei Bedarf programmiert werden, um über den aktuellen Datenstand zu verfügen. Die Ethernet-Technologie ist ein Punkt-zu-Punkt-Kommunikationssystem und erlaubt eine Datenübertragungsrate von 100 MBit/s (zum Vergleich: HS-CAN 500 kBit/s).
Beim Ford Mustang Mach-E erfolgt die Programmierung für verschiedene Steuergeräte über einen Ethernet-Zugang, der vor allem für Over-the-Air-Updates genutzt wird, um die Daten schnell und sicher von der angeschlossenen externen Quelle (Daten-Cloud) über das Steuergerät Telematikeinheit (TCU) zum Gateway-Steuergerät (GWM) zu übertragen.
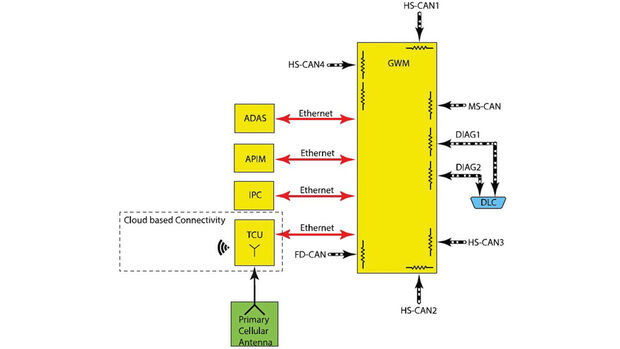
Ausschnitt aus der Gesamtvernetzung des Ford Mustang Mach-E. Das Gateway (GWM) dient zur Verbindung von Bus-Systemen unterschiedlicher Art. Für die Fahrzeugdiagnose dient der DLC als Bindeglied zwischen Gateway und Diagnosegerät. ADAS = Fahrerassistenzsysteme, APIM = SYNC-Modul, IPC = Kombi-Instrument, TCU = Steuergerät Telematikeinheit
Derzeit sind alle Ford-Fahrzeuge, die mit dem Multimediasystem SYNC 4 ausgestattet sind, mit Ethernet ausgestattet.
Die Ethernet-Kommunikationsnetzwerkkabel sind verdrillte, ungeschirmte Kabel zur Herstellung von Punkt-zu-Punkt-Verbindungen. Das Ethernet-Netzwerk ist über einen Hauptstecker mit dem GWM verbunden.
Im Gegensatz zu CAN- und LIN-Bus können bei Ethernet-Kommunikationsnetzwerken keine verwertbaren Signale mit dem Oszilloskop aufgezeichnet werden. Bei einer Fehlermeldung müssen die Ethernet-Kabel auf Durchgang, Neben-, Masse- und Plusschluss gemessen werden.
OTA (Over the Air)
Bisher wurde diese Methode zum Aufspielen neuer Software auf Smartphones verwendet. Mit dem zunehmenden Einsatz von Computertechnologie im Fahrzeugbau wird diese Technologie auch immer öfter im Fahrzeug eingesetzt.
Beim Ford Mustang Mach-E können Anwendungen und Einstellungen drahtlos aktualisiert werden. Möglich wird dies durch sogenannte Over-the-Air(OTA)-Updates, die per Mobilfunk oder WLAN zum Beispiel Sicherheitserweiterungen und Funktionsverbesserungen auf den neuesten Stand bringen oder neue Funktionen freischalten. Das bedeutet, dass sich das Fahrzeug nicht physisch in einer Werkstatt befinden muss, sondern jederzeit an nahezu jedem Ort der Welt aktualisiert werden kann.
Over-the-Air-Updates sind kontinuierliche Aktualisierungen aus der Ford-Cloud. Standardmäßig startet das Fahrzeug den Updatevorgang, sobald neue Software verfügbar ist. Nachdem das Steuergerät Telematikeinheit (TCU) die Software aus der Cloud heruntergeladen hat, überträgt die TCU die neue Software an das Gateway-Steuergerät (GWM). Das GWM aktualisiert das Zielmodul.
Bluetooth
Bluetooth ist ein in den 1990er-Jahren entwickelter Industriestandard, der es ermöglicht, zwei Geräte drahtlos per Funk miteinander zu verbinden und Daten auszutauschen.
Wenn der Ford-Mustang-Mach-E-Kunde die "FordPass Mobile App" auf seinem Smartphone installiert hat, kann er das Smartphone als digitalen Schlüssel (Phone As A Key – PAAK) einrichten, der dann mit den Bluetooth-Antennen des Fahrzeugs kommuniziert. Dazu muss das Smartphone über Bluetooth Low Energy Version 4.2 oder höher verfügen, und Bluetooth muss immer eingeschaltet sein, um korrekt zu funktionieren.
Info
Zahlensysteme
In der Computertechnik gibt es drei wichtige Zahlensysteme: das dezimale, das binäre und das hexadezimale Zahlensystem.
Dezimalsystem
Das Dezimalsystem ist das gebräuchliche arabische Zahlensystem und leitet sich wahrscheinlich von der Tatsache ab, dass wir zuerst mit unseren zehn Fingern gezählt haben. Dieses Zahlensystem hat die Basis 10, d. h. für jede Stelle einer Zahl gibt es zehn verschiedene Zeichen. Daraus ergeben sich zehn verschiedene Möglichkeiten, eine einstellige Zahl darzustellen: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9.
Binärsystem
Das Binärsystem (Bi kommt aus dem Griechischen und bedeutet zwei) ist eines der gebräuchlichsten Zahlensysteme in der Datenverarbeitung, da es nur zwei Zustände kennt: 0 und 1 bzw. ein oder aus bzw. hohe Spannung oder niedrige Spannung.
Hexadezimalsystem
Das Hexadezimalsystem ist die Kurzschreibweise für Binärzeichen. Mit zwei Hexadezimalziffern können achtstellige Binärzahlen zusammengefasst werden. Statt 10 Ziffern wie im Dezimalsystem stehen 16 Ziffern zur Verfügung. Dies sind die Ziffern 0 bis 9 und zusätzlich die Buchstaben A bis F. Dabei steht das A für die Dezimalzahl 10 und das F für die Dezimalzahl 15
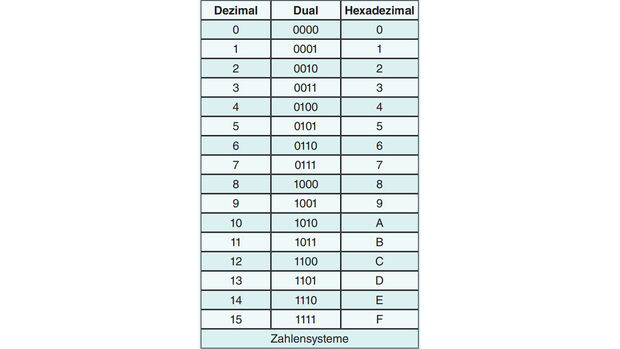
Zahlensysteme

Fazit
Moderne Autos sind vollgestopft mit Elektrik und Elektronik, wodurch konventionelle Kabelbäume viele Ausfälle verursachen würden. Zudem müssen Computer auch in Zukunft untereinander kommunizieren können. Dies wird durch moderne Datenbus-Systeme ermöglicht.
Diese Übersicht der unterschiedlichen Datenbus-Systeme soll zu einem besseren Verständnis dieser Systeme beitragen. Dieses Wissen ist für alle Kfz-Techniker wichtig und sollte die Lokalisierung von Störungen in Datenbus-Systemen erleichtern.




