
Um die Antriebskraft bei Fahrzeugen mit einem Antriebsmotor mechanisch auf mehrere Räder zu verteilen, braucht man Differenzialgetriebe. Der Grund dafür liegt in den unterschiedlichen Kreisbogenlängen, die die Räder bei Kurvenfahrt zurücklegen müssen. So beschreiben die kurvenäußeren Räder, was sich etwa in verschneiten Kurven schön beobachten lässt, einen längeren Weg als die kurveninneren. Ebenso legt ein Rad beim Überfahren von Unebenheiten einen längeren Weg zurück als das Rad ohne dieses Hindernis. Bei Allradfahrzeugen besteht dieses Problem gleich doppelt: Hier gilt es, Drehzahlunterschiede nicht nur zwischen linken und rechten Rädern, sondern auch zwischen Vorder- und Hinterachse auszugleichen.







Differenziale gleichen Drehzahlunterschiede aus
Mit Differenzialgetrieben (auch Differenzial oder Diff genannt) lassen sich diese Drehzahlunterschiede ausgleichen. Doch was auf der einen Seite ein Segen ist, kann in manchen Situationen zum Fluch werden. Dreht nämlich nur ein Rad des Antriebssystems mangels Haftung durch, etwa in sehr schnell gefahrenen Kurven, bei Schnee, Eis, Matsch oder bei mangelndem Bodenkontakt, verpufft dort der gesamte Vortrieb, alle anderen Räder bleiben kraftlos. Wohl dem, der ein teilweise oder komplett sperrendes bzw. sperrbares Differenzial besitzt.
Das einfache, offene Differenzial verteilt bei gutem Grip das Antriebsmoment stets zu gleichen Teilen. Was unter normalen Bedingungen gewünscht ist, kann im klassischen Fall mit der einseitig vereisten Fahrbahn schnell zum Nachteil werden. Denn dann bestimmt das Rad mit dem schlechteren Haftungsverhältnis die Antriebskraft. Und die Kraft, die auf der vereisten Seite das Rad zum Durchdrehen bringt, reicht leider meist auf der anderen Seite nicht für ein Vorwärtskommen aus.
Was 40% Sperrwirkung bedeuten
Um dennoch Kraft an das Rad mit besserer Haftung weiterzugeben, werden Differenziale mit Sperrfunktion eingesetzt. Durch festes oder variables Koppeln der rechten und linken Achswellen gelingt es, Drehmoment vom schneller drehenden Rad auf das langsamere zu leiten. Alternativ kann auch das durchdrehende Rad abgebremst werden, um mehr Antriebsmoment auf das langsame Rad zu bekommen.
Die Prozentwerte, die oft in Zusammenhang mit der Sperrwirkung genannt werden (etwa: 40 % auf Zug und 80 % im Schubbetrieb), beziehen sich auf die erreichbare Drehmomentdifferenz zwischen den Abtrieben, bezogen auf das am Differenzial anliegende, meist vom Motor eingeleitete Gesamtdrehmoment. Alternativ wird das zwischen den Abtrieben erreichbare Drehmomentverhältnis angegeben, genannt TBR (Englisch: Torque Bias Ratio).
Ein weiteres Unterscheidungsmerkmal von Differenzialen ist ihre Art, auf Schlupf zu reagieren. Abgesehen von der elektronischen und der Vollwertsperre gibt es drehmoment- und drehzahlfühlende Sperren.
Zuerst ein kurzer Blick auf die Funktionsweise eines offenen Differenzials, da dies meist die Basis für Sperrdifferenziale (feste oder variable Quersperre zwischen linkem und rechtem Rad) bildet. Ein Differenzial ist in seiner Grundfunktion ein Planetengetriebe, wodurch sich in der Beschreibung teils begriffliche Gemeinsamkeiten ergeben. Im folgenden Bild dargestellt ist ein offenes Kegelraddifferenzial, der meist verbreitete Typ dieser Ausgleichsgetriebe.
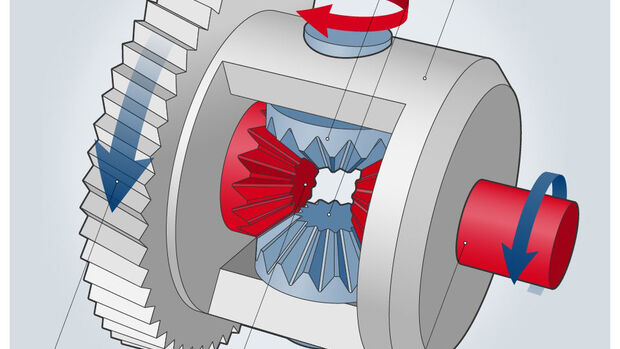
Das Antriebsmoment wird hier vom Getriebe entweder über eine Kardanwelle mittels Kegel- und Tellerrad (bei Heckantrieb) oder einem Stirnrad (bei Frontantrieb im Getriebe integriert) auf den Differenzialkorb oder -käfig übertragen.
Fährt das Fahrzeug nun auf gerader, ebener Fahrbahn, gibt es keine Drehzahlunterschiede zwischen linkem und rechtem Rad. In diesem Fall gelangt das Antriebsmoment vom Differenzialkorb (grau) über die stillstehenden Planetenräder (blau) zu gleichen Teilen und mit gleicher Drehzahl auf die mit den Antriebswellen verbundenen Zentralwellen (rot). Wird nun eine Kurve durchfahren, legt das kurvenäußere Rad einen längeren Weg zurück und erreicht dadurch eine höhere Drehzahl. Als Folge drehen sich nun die Planetenräder (blau) zusätzlich um ihre eigene Achse und schaffen somit die Möglichkeit zum Drehzahlausgleich. Nun unterscheidet sich zwar die Drehzahl, aber das Antriebsmoment ist auf beiden Seiten immer noch identisch.
Elektronische Quersperre
Bei den heute meist verbreiteten (Quer-)Sperren ist im eigentlichen Sinne nicht die Funktion eines mechanischen Sperrdifferenzials gemeint. Tatsache ist: Bei vielen Fahrzeugen ist auch weiterhin ein offenes Differenzial verbaut. Die Kraftverteilung übernimmt eine Zusatzfunktion des ABS/ESP quasi als elektronische Sperre. Wird durch Raddrehzahlsensorik und Software ein durchdrehendes Rad erkannt, kann dies durch elektronischen Bremsdruckaufbau gezielt und automatisch abgebremst werden. Durch das nun vorhandene Bremsmoment erhöht sich das Widerstandsmoment am durchdrehenden Rad und da im offenen Differenzial die Momente auf beiden Seiten stets gleich sind, wird nun auch dem Rad mit der besseren Bodenhaftung Antriebsmoment zugeteilt. Durch diese vor allem kostengünstige Lösung lässt sich in den meisten Fällen ein Vorankommen sichern. Allerdings sind damit weder Gelände- noch Sportfahrer zufriedenzustellen, da ein Teil der Antriebsleistung im Erwärmen der Bremse verpufft.
Vollsperre
Eine weitere, relativ einfache Lösung, die heute vor allem im Geländewagenbereich (nicht SUV) anzutreffen ist, ist das schaltbare Sperrdifferenzial, auch Vollsperre genannt. Diese Sperrdifferenziale basieren in der Regel auf einem offenen Differenzial, das sich, etwa durch eine Klauenkupplung, zu 100 Prozent sperren lässt.

Zum Sperren werden eine Abtriebsseite und der Differenzialkorb (auch das Koppeln beider Abtriebsseiten ist möglich) formschlüssig miteinander verbunden.
Ein klassischer Geländewagen, wie etwa der Mercedes G, besitzt im Optimalfall drei solche Sperren – an Vorder- und Hinterachse sowie im Mittendifferenzial. Sind alle Differenziale gesperrt, werden alle Räder mit demselben Moment und gleicher Drehzahl angetrieben, egal ob sie gerade Bodenkontakt haben oder in der Luft hängen.
Allerdings sollte ein solches Fahrzeug nur auf losem oder rutschigem Untergrund mit eingelegten Sperren bewegt werden. Durch den starren Durchtrieb ergeben sich bei Kurvenfahrt Verspannungen im Antriebsstrang, was radierende Reifen und vergrößerte Kurvenradien (Untersteuern) zur Folge hat.
Eine weitere Variante der Vollsperre, die häufig bei Geländewagen und SUV aus den USA Anwendung findet, ist der Eaton Locker. Dieses drehzahlfühlende Sperrdifferenzial sitzt für gewöhnlich an der Hinterachse und arbeitet im Normalbetrieb als offenes Differenzial. Tritt ein Drehzahlunterschied zwischen linkem und rechtem Antriebsrad auf, wird ein Fliehgewicht im Differenzial in Rotation versetzt. Dreht ein Rad durch, wirkt dieses Fliehgewicht auf eine Wellenscheibe, die wiederum über Reibscheiben das Differenzial gegen das Gehäuse ausbremst und so die Sperrfunktion aktiviert.
Festwertsperre / Lamellensperrdifferenzial
Eine andere Form der mechanischen Sperre ist die Festwertsperre.
Festwertsperren sind Lamellensperrdifferenziale (LSD) mit hoher Vorspannung, wodurch eine permanente Sperrwirkung gegeben ist. In solchen Lamellensperrdifferenzialen wird durch den Rampenwinkel im Sperrelement sowie durch Reibflächen, teilweise federbelastet oder vorgespannt, ein konstantes Sperrmoment zwischen den Abtrieben erzeugt. Sobald die Festwertsperre unter Last steht, ist sie erst einmal voll gesperrt. Beide Räder drehen also gleich schnell und es findet kein Drehzahlausgleich statt. Erst wenn die Drehmomentdifferenz des linken und rechten Rades oder von Vorderachse zu Hinterachse den maximalen Sperrgrad überschreitet, beginnen die Lamellenkupplungen zu rutschen (Übergang von Haft- in Gleitreibung) und die Sperre lässt ab diesem Moment unterschiedliche Raddrehzahlen zu. Der Sperrwert ist konstant, die Sperre sorgt dafür, dass jede Seite stets einen festgelegten Prozentsatz (Sperrwert) des Antriebsmoments bekommt. Durch die Auslegung der Reibflächengröße, deren Anzahl und die Gestaltung des Rampenwinkels im Druckring/Differenzialkorb lässt sich die Höhe der Sperrwirkung beeinflussen.

Hierbei besteht auch die Möglichkeit, die Rampenwinkel dem jeweiligen Einsatzzweck anzupassen. So lässt sich der Sperrwert für den Zugbetrieb (Beschleunigung) durch einen entsprechenden Winkel beispielsweise auf 40 % festlegen, der für Schubbetrieb etwa auf 90 %. Dies macht Sinn, wenn ein Fahrzeug, wie etwa der Porsche 911, sehr hecklastig ist und so eine höhere Spurstabilität erreicht werden soll.
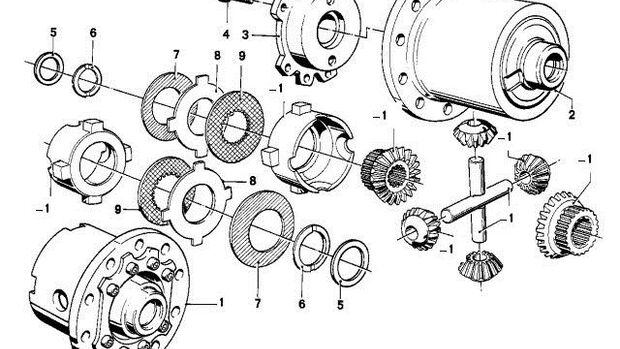
Die Tellerfeder (Explosionszeichnung; Bauteil 7) beeinflusst die Vorspannung und somit das Losbrechmoment. Die Vorspannung definiert die Kraft, mit der die lastfreien Lamellen zum "Durchrutschen" gebracht werden können. Eine Sperre ohne Vorspannung (sprich ohne Tellerfedern) funktioniert lastfrei wie ein offenes Differenzial. Sofern ein Rad in der Luft ist und damit kein Moment übertragen kann, kommt auch auf der anderen Seite kein Moment an. Es wird kein Vortrieb mehr generiert! Das Gegenteil davon, eine sehr hohe Vorspannung, ermöglicht auch ohne Moment an einem Rad kontinuierlich eine erhebliche Umverteilung der Last. Nachteil der Sache: Bei Kurvenfahrt wird den Rädern keine ausreichende Drehzahldifferenz gewährt, die Sperre sperrt dank der Vorspannung weiter und das Fahrzeug neigt zum Untersteuern. Je nach Fahrzeug und Einsatzzweck muss hier jeweils der Kompromiss gefunden werden. In der Praxis wurden Sperren dieser Art meist mit Sperrwerten von 25–40 % verbaut. In älteren Fahrzeugen wie etwa dem BMW E30/36 oder auch dem VW-Bus T3 gab es diese Traktionsverbesserer als Sonderausstattung. Im Motorsport ist dieser Sperrentyp auch heute noch sehr beliebt, da sich die Sperren gut auf die jeweiligen Anforderungen von Fahrer und Strecke einstellen lassen und eine hohe Performance bieten. Leider lässt aber aufgrund der nicht verschleißfreien Lamellen die Sperrwirkung mit zunehmender Laufleistung nach, was gelegentliche Revisionen erforderlich macht.
Elektronisch gesteuertes Lamellensperrdifferenzial
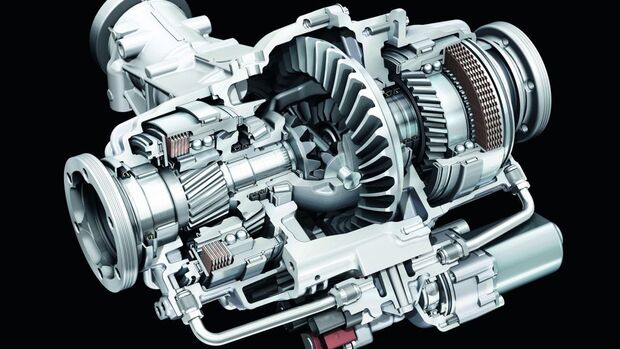
Die konsequente Weiterentwicklung der Festwertsperre mit Lamellenkupplungen ist das elektronisch gesteuerte Lamellensperrdifferenzial. Gegenüber seinem mechanischen "Großvater" befinden sich darin keine Druckringe mit Rampenwinkel und Vorspannfedern, sondern ein präziser Stellmotor.

Das dargestellte Getriebe stammt aus dem BMW M5 (F10) und wurde in Zusammenarbeit mit der Firma GKN entwickelt. Verkauft wurde es unter dem Namen "Aktives M-Differenzial". In ähnlicher Form gibt es ein solches elektronisch gesteuertes Lamellensperrdifferenzial (eLSD) auch als Mittendifferenzial für den Allradantrieb, z. B. in verschiedenen Audi-Quattro-Modellen. Hier allerdings mit einer hydraulischen Regelung.
Die aktive Regelung der Lamellensperre im Hinterachsdifferenzial erfolgt mit hoher Präzision und Schnelligkeit. Ihr Steuergerät ist über den Flex-Ray-Bus mit der Fahrstabilitätsregelung verbunden. Es gleicht permanent die von den eigenen Sensoren erfassten Daten mit den Angaben der Fahrstabilitätsregelung ab und errechnet daraus das für optimale Traktion und Stabilität ideale Sperrmoment. Die Daten der Fahrstabilitätsregelung werden auch übertragen, wenn diese deaktiviert ist. Das Sperrmoment innerhalb des Differenzials kann zwischen 0 % und 100 % betragen.
Zusätzlich zu den internen und den von der Fahrstabilitätsregelung bereitgestellten Daten berücksichtigt das Steuergerät des Aktiven M-Differenzials auch die Gaspedalstellung, die Raddrehzahlen und die Gierrate des Fahrzeugs. So wird jede Fahrsituation präzise analysiert und die Gefahr eines einseitigen Traktionsverlustes bereits im Vorfeld erkannt.
Innerhalb von Sekundenbruchteilen erfolgt dann die Anpassung des Sperrmoments. Dadurch wird auch auf rutschigem Untergrund wie auch bei hohen Reibwertunterschieden zwischen dem rechten und linken Hinterrad, in engen Kehren oder bei besonders dynamischen Richtungswechseln das Durchdrehen eines Rades verhindert. Darüber hinaus wirkt das Aktive M-Differenzial einem Traktionsverlust bei mit hohen Geschwindigkeiten ausgeführten doppelten Spurwechseln ebenso wirksam entgegen wie einer Tendenz zum Untersteuern bei plötzlichem Lastwechsel während einer dynamischen Kurvenfahrt. Im Differenzial treibt der Stellmotor über einen Stirnradmechanismus eine Kugelrampe an, die wiederum das Lamellenpaket mit dem zum gewünschten Sperrgrad passenden Druck beaufschlagt.
Torsen-Differenzial
Das Torsen-Differenzial ist ein weiterer alter Bekannter aus der Allradtechnik. Der erste Einsatz in einem Pkw war 1983 im HMMWV, der Militärversion des Hummer. Bekannt wurde es 1986 durch den Großeinsatz als Mittendifferenzial in den Quattro-Modellen von Audi. Aber auch der legendäre Lancia Delta Integrale (1986) oder der aktuelle Subaru BRZ (2012) benutzen ein Torsen-Differenzial als Hinterachsdifferenzial. Der Name "Torsen" leitet sich von den englischen Worten für "Drehmoment" (Torque) und "empfindlich" (sensitive) ab. Dieses Kunstwort beschreibt die drehmomentfühlende Eigenschaft dieser Sperrdifferenziale. Beim Torsen-Differenzial wird wie meist üblich das Gehäuse mit dem Antriebsmoment versorgt.
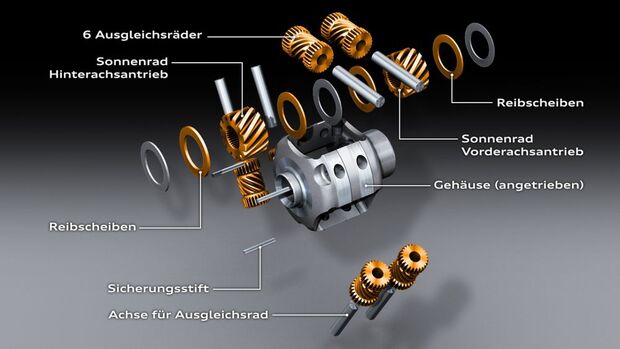
Im Inneren sind sechs Ausgleichsräder verbaut, die alle ihre eigene Achse haben, auf der sie sich drehen können. Diese Achse wiederum ist fest mit dem Gehäuse verbunden. Am Ende der Ausgleichsräder sitzen jeweils zwei Stirnräder, die sie miteinander verbinden. Die linken und rechten drei Ausgleichsräder greifen jeweils über ihren Schneckentrieb in das linke und rechte Sonnenrad ein und können somit angetrieben werden. Die Ausgleichsräder können jedoch aufgrund der Selbsthemmung des Schneckentriebes nicht die Sonnenräder antreiben! Die Sonnenräder sind voneinander getrennt, werden von Reibscheiben in ihrer Drehwilligkeit eingeschränkt und treiben jeweils die Antriebswellen an.
Bei guten Traktionsverhältnissen dreht sich der Differenzialkorb als Ganzes und das Moment geht ohne Sperrwirkung über die sich nicht drehenden Ausgleichsräder auf die nicht drehenden Sonnenräder und somit auf die Antriebswellen weiter. Wird nun eine Kurve durchfahren, muss das Torsen die Aufgabe eines offenen Differenzials übernehmen. Dies geschieht dadurch, dass das Sonnenrad des schnelleren Rades um den Prozentsatz schneller dreht, als das gegenüberliegende langsamer ist. Im Torsen drehen sich die drei Ausgleichsräder jedes Sonnenrades hierbei mit gleicher Geschwindigkeit über die Stirnräder an ihren Enden, allerdings gegenläufig zueinander, wodurch die feste Aufteilung an den Sonnenrädern entsteht. Hat nun ein Rad oder eine Achse Schlupf und der Drehzahlunterschied der Sonnenräder ist so groß, dass er über die möglichen Differenzen beim Kurvenbetrieb hinausgeht, beginnt das Torsen sich zu sperren. Dies passiert über die Selbsthemmung der Ausgleichs- und Sonnenräder. Die schnellere Seite kann das Moment nicht mehr über die Ausgleichsräder zur langsameren verteilen. Die Folge daraus ist, dass sich das Torsen komplett mechanisch sperrt. Dies funktioniert allerdings nur, wenn das Fahrzeug in Bewegung ist, also auch ein (wenn auch geringes) Moment am Rad mit größerem Schlupf übertragen werden kann. Soll mit einem Rad oder einer Achse etwa auf Eis angefahren werden, hat das Torsen die gleichen Probleme wie ein offenes Differenzial, da es ja nur sperren kann, wenn es eine Momentendifferenz gibt.
Aus diesem Grund sind Fahrzeuge mit Torsen-Differenzial entweder mit einer Möglichkeit ausgerüstet, es zu "umgehen", sprich die Kraft per Fahrereingriff mittels einer Sperre oder Bremse durchzuleiten oder sie sind mit einem ESP-System ausgestattet, das das frei drehende Rad zur Momentenumleitung einbremsen kann.
Selbstsperrendes Mittendifferenzial / Torsen 2
Die Weiterentwicklung des Torsen führte bei Audi zum selbstsperrenden Mittendifferenzial. Der Wunsch war, die Fahrzeuge mit einer höheren Dynamik zu versehen und schon im Normalbetrieb mehr Moment an die Hinterachse zu leiten. Dies gelang mit einer Abänderung des klassischen Torsen-Differenzials. Anstatt der gleich großen Stirnräder griff man auf ein Planetengetriebe zurück. Wie im folgenden Bild zu sehen ist, findet die Krafteinleitung vom Getriebe über den Planetenträger statt.
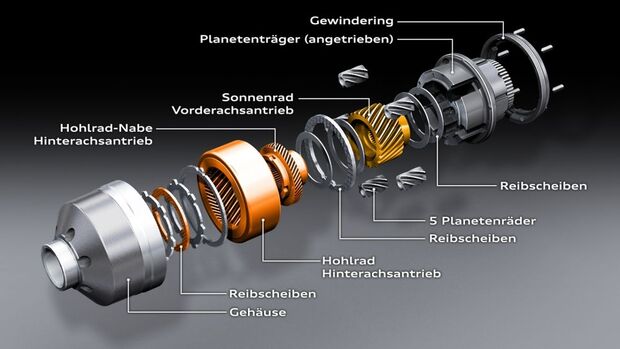
Die fünf Planeten laufen über das Sonnenrad, das den Antrieb der Vorderachse darstellt, wie auch im Hohlrad, dessen Nabe das Moment via Kardanwelle zur Hinterachse leitet. Die asymmetrische Grundverteilung der Momente zwischen Vorderachse und Hinterachse entsteht durch die unterschiedlichen Teilkreisdurchmesser von Sonnenrad und Hohlrad. Zusätzlich sind an Sonnen- und Hohlrad noch Reibscheiben angebracht. Diese Scheiben übernehmen die Sperrfunktion. Fährt das Fahrzeug nun mit geringer Last bzw. ohne Schlupf an einer Achse, gelangt das Moment zu den durch die Grundverteilung bestimmten Prozenten zu den Achsen. Hat nun eine Achse Schlupf, steigt ihre Drehzahl. Dies führt zu einer axialen Bewegung der schräg verzahnten Zahnräder des Planetengetriebes. Durch die Axialkraft werden die Reibscheiben der "anderen Seite" aktiviert. Dreht beispielsweise die vordere Achse durch, gelangt durch die axiale Verschiebung und Druckbeaufschlagung der Reibscheiben mehr Moment zur Hinterachse. Die möglichen Übertragungsraten liegen je nach Auslegung bei einer Übertragung von bis zu 80 % des Antriebsmoments auf die Hinterachse und bis zu 60 % auf die Vorderachse. Diese rein mechanische Regelung ist in der Lage, innerhalb weniger Sekundenbruchteile und vom Fahrer unbemerkt einzugreifen.
Kronenraddifferenzial
Die nächste Stufe im Quattro-Antrieb zündete Audi im RS 5 von 2010. Das Kronenraddifferenzial, das inzwischen in einigen Quattro-Modellen verfügbar ist, bietet nochmals größere Möglichkeiten der Umverteilung, nämlich bis zu 85 % des Antriebsmoments an die Hinterräder und bis zu 70 % an die Vorderräder. Zudem ist es zwei Kilogramm leichter als sein Vorgänger, was beim heutigen Kampf um jedes Gramm ein entscheidender Vorteil ist. Der Aufbau des Kronenraddifferenzials ähnelt dem des zuvor beschriebenen selbstsperrenden Mittendifferenzials. Allerdings befindet sich im Innern kein Planetengetriebe, sondern zwei Kronenräder.
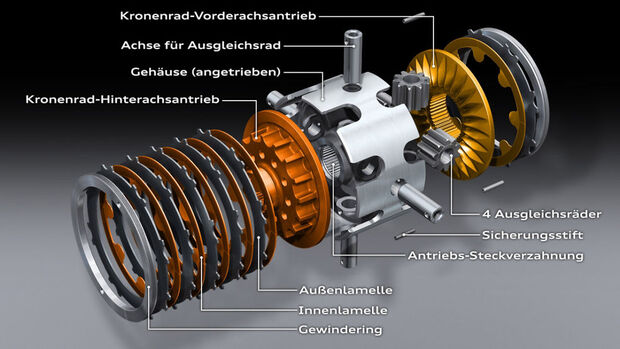
Das Antriebsmoment wird über das Gehäuse auf vier Ausgleichsräder geleitet. Die Ausgleichsräder laufen auf den Kronenrädern von Vorderachse und Hinterachse. Die Grundverteilung gelingt in diesem Fall durch die Ausgestaltung der Kronenräder, bei denen das für die Vorderachse (40 % Antriebsmoment) einen anderen Hebelpunkt besitzt als das der Hinterachse (60 % in Grundabstimmung). Hinter den Kronenrädern sind Lamellen zum Abbremsen angeordnet.
Im normalen Fahrbetrieb drehen sich die Kronenräder so schnell wie das Gehäuse. Findet nun ein Ausgleich statt, da einer Achse der Gripverlust droht, drehen sich die Kronenräder mit einer unterschiedlichen Drehzahl. Durch die Gestaltung dieser Räder entsteht abhängig vom Drehzahlunterschied eine axiale Bewegung, die zum Schließen der Lamellen und somit zu einem Sperrmoment führt. Auch hier steht das Sperrmoment wieder in direktem Zusammenhang mit der Drehzahldifferenz der Kronenräder und somit der Vorderachse und der Hinterachse.
Viscokupplung / -sperre
Die Viscokupplung ist seit den 80er-Jahren ein gern gesehener Gast im Automobilbau. Auch sie lässt sich als Längs- und Quersperre verwenden. Eingesetzt wurde sie zum Beispiel schon im VW T3, aber auch im Volvo XC70 oder im Audi R8.
Im Gegensatz zu Fahrzeugen mit Mittendifferenzial wird bei diesen Modellen zunächst nur eine Achse angetrieben, die andere nur im Bedarfsfall. So aufgebaute Allradsysteme nennt man Hang-on-Allrad. Für die unkomplizierte automatische Zuschaltung einer zweiten Antriebsachse bietet sich das Prinzip der Viscokupplung an. Eine weitere Einsatzmöglichkeit von Viscokupplungen oder -sperren nutzt etwa der japanische Allradspezialist Subaru. Hier werden Vorder- und Hinterachse über ein Mittendifferenzial stets mit einem festen Prozentsatz der Antriebsleistung beaufschlagt, eine Viscosperre übernimmt im Bedarfsfall die, wie ihr Name schon sagt, Sperrwirkung zwischen den Achsen. Eine weitere Einsatzmöglichkeit ist die Verwendung als Quersperre, etwa im BMW M3 (E46 und E92).
Folgende Zeichnung zeigt eine Viscokupplung, die Leistung und Drehmoment über die Abtriebsseite (1) zum Differenzial einer Achse weiterleitet.
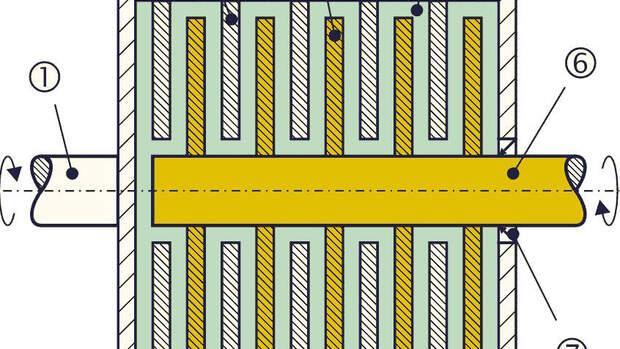
Die Viscokupplung selbst besteht aus einem Gehäuse (2), dessen Innenseite gleichzeitig als Träger für die Außenlamellen (3) dient. Zwischen den Außenlamellen (3) und den Innenlamellen (4) befindet sich ein Silikonöl (5). Die Innenlamellen (4) selbst werden von einem Innenlamellenträger (6) gehalten, der gleichzeitig Antriebswelle ist. Das Gehäuse wird über eine Dichtung (7) gegen das Auslaufen des Silikonöls (5) und das Eindringen von Staub geschützt.
Die eigentliche Funktion der Viscokupplung ("Visco" von "Viskosität") entsteht durch die Beschaffenheit des Silikonöls und der restlichen Luft im Gehäuse. Das Silikonöl hat die Aufgabe, sich bei Differenzdrehzahlen von An- und Abtriebsseite, die keinen mechanischen Kontakt zueinander haben, zu erwärmen. Die Erwärmung führt zu einer Viskositätsänderung des Silikonöls und die Viscokupplung beginnt zu sperren. Dies passiert schon bei sehr kleinen Drehzahlunterschieden, es wird allerdings erst ein geringeres Moment übertragen.
Sobald die permanent angetriebene Achse bei einem Hang-on-Fahrzeug zu viel Leistung bekommt, vergrößert sich der Schlupf an deren Rädern. Die Achse dreht dadurch schneller, als es der Fahrzeuggeschwindigkeit entspricht und sie dreht auch schneller als die andere Achse. Dadurch entsteht eine Differenzdrehzahl zwischen den Achsen, die auch zu einer Differenzdrehzahl in der Viscokupplung führt. Je höher diese Differenzdrehzahl ist, umso stärker wird die zweite Achse über die Viscokupplung angetrieben.
Steht die erste, direkt angetriebene Achse auf Eis und dreht durch, so wird nahezu die gesamte Leistung über die Viscokupplung an die zweite Achse übertragen. Prinzipbedingt kann die Viscokupplung nur Drehmomente übertragen, wenn eine Drehzahldifferenz vorhanden ist. Dies bedeutet aber auch, dass bei einer Drehzahldifferenz auch Leistungsverluste entstehen, d. h., ein kleiner Teil der Motorleistung kommt nicht am Rad an, sondern wird von der Viscokupplung in Wärme umgewandelt.
Der Hump-Effekt
Steigt die Drehzahldifferenz in der Viscokupplung, nimmt auch das übertragbare Drehmoment zu. Wenn sich die Viscokupplung im Betrieb dazu weiter erwärmt, dehnt sich das Silikonöl mehr aus und Luft wird immer mehr im Silikonöl gelöst, sodass die Kupplung bei starker Erwärmung unter Umständen keine Luftblasen mehr enthält. Sobald dieser Zustand erreicht ist, steigt der Druck in der Viscokupplung stark an (bis zu 150 bar), wodurch bei entsprechender Konstruktion der Lamellen der Hump-Effekt ausgelöst wird. Dieser Effekt bewirkt, dass die Viscokupplung bei größerer Belastung plötzlich höhere Drehmomente überträgt, ohne dass sich die Drehzahldifferenz dazu ändern muss.
Um das gezielt zu erreichen, sind die Innenlamellen an ihren radialen Nuten wie ein Flügelprofil geformt. Wenn die Luft völlig im Silikonöl gelöst ist, werden sie so gegen die Außenlamellen gedrückt, dass zusätzliche mechanische Reibung zwischen den Lamellen entsteht.
Allerdings ist der Hump-Effekt nicht richtig planbar. Er tritt meist ein, wenn die Viscokupplung an ihrer mechanischen Lastgrenze arbeitet. Dies kann bei niedrigerer Drehzahldifferenz und längerer Beanspruchung auftreten, genauso wie bei hoher Drehzahldifferenz und kurzer Belastungsdauer.
In der Praxis wird der Hump-Effekt genutzt, um kurzfristig mehr Moment übertragen zu können, was letztlich in kritischen Fahrsituationen mehr Traktionsreserven bringt. Allerdings funktioniert dieser Effekt nur bei Drehzahldifferenz, auch entsteht keine hundertprozentige Sperrwirkung. Denn sobald sich die Drehzahldifferenz reduziert, fällt der hydrodynamische Effekt weg, die Lamellen arbeiten wieder ohne mechanische Reibung und die Viscokupplung wieder im Standardbetrieb.
Die Betriebstemperatur hat dabei deutlichen Einfluss auf das Eintreten des Hump-Effekts: Je wärmer die Viscokupplung ist, umso schneller kehrt sie bei Überlastung in den Hump-Modus zurück. Kommt die Kupplung nun in einem Fahrzeug mit permanentem Allrad zum Einsatz, wird die Drehzahldifferenz zwischen den Achsen reduziert, wenn z. B. eine Achse auf Eis steht oder in der Luft hängt. Als Quersperre kann sie auch Drehzahldifferenzen ausbremsen, die an einem Differenzial auftreten. Wenn die Drehzahldifferenz an einer Achse zu groß wird (ein Rad auf Eis), dann bremst die Viscokupplung diese Ausgleichsbewegung und verteilt so das Antriebsmoment auf das langsamere Rad.
Haldex-Kupplung
Im VW-Konzern startete die Haldex-Kupplung 1998 im Golf IV 4Motion und im A3 Quattro als Nachfolger der Viscokupplung. Bis heute werden die Modelle mit quer eingebauten Frontmotoren und Allrad bzw. Hang-on-Allrad mit Haldex-Kupplung angeboten. Inzwischen setzen aber auch andere Hersteller auf dieses System, so z. B. Ford im Kuga, Opel im Insignia, aber auch Volvo sowie Saab bei Allradmodellen.
Das zu Beginn schon innovative System, anfangs noch mit mechanisch-elektrischer Druckerzeugung, ist inzwischen in Generation 5 angekommen und wurde in den Komponenten wie auch im Packaging deutlich abgespeckt. Und das ohne Einschränkungen. Die Funktion wird durch eine intelligente Steuerung sogar noch erweitert. Nachfolgendes Bild zeigt eine Haldex-Kupplung der Generation 5, wie sie beispielsweise im Golf VII 4Motion oder Golf R eingebaut wird.
Das Moment der Kardanwelle kommt über den Flansch (5) direkt in das Lamellenpaket. Dieses besteht aus abwechselnd mit dem Flansch sowie dem Triebling für das Hinterachsdifferenzial verbundenen Lamellen.
Das Lamellenpaket läuft zur besseren thermischen Kontrolle in Öl. Bei geringer Last oder im Schub erfolgt der Vortrieb primär über die Vorderachse, die Hinterachse ist dabei entkoppelt. Diese Grundabstimmung spart Kraftstoff. Die Hinterachse kann bei Bedarf in Sekundenbruchteilen stufenlos zugeschaltet werden. Das geschieht über die elektrohydraulische Ölpumpe (1). Das Steuergerät (2) errechnet permanent das ideale Antriebsmoment für die Hinterachse und regelt über die Ansteuerung der Ölpumpe, wie weit die Lamellenkupplung geschlossen werden soll.
Dabei steigt der Anpressdruck auf die Kupplungslamellen proportional zum an der Hinterachse gewünschten Drehmoment. Mit der Höhe des Drucks auf die Kupplungslamellen lässt sich das übertragbare Drehmoment stufenlos variieren. Selbst beim schnellen Anfahren und Beschleunigen des 300 PS starken Golf R wird ein Durchdrehen der Räder vollends verhindert, da das Steuergerät die Drehmomentverteilung entsprechend den dynamischen Achslasten regelt. Die Ansteuerung der Haldex-5-Kupplung erfolgt in erster Linie in Abhängigkeit vom Motordrehmoment, das der Fahrer anfordert. Parallel wertet eine sogenannte Fahrzustandserkennung im Allradsteuergerät Parameter wie die Raddrehzahlen und den Lenkwinkel aus. Je nach Bedarf können nahezu 100 % des Antriebsmoments an die Hinterachse geleitet werden.
Einen Schritt weiter geht etwa Mercedes beim Allradantrieb der GLA-Modelle. Hier wird die Lamellenkupplung des Hinterachsantriebs von der Kardanwelle mit geringfügig höherer Drehzahl angefahren, was beim vollständigen Schließen des Lamellenpakets zu einem sehr heckbetonten Antrieb führen soll.
Torque-Vectoring- / Active-Yaw-Differenzial
Eine noch relativ junge Entwicklung unter den Differenzialen sind solche mit Momentenverteilung. Der Vorteil dieser Sonderdifferenziale ergibt sich aus der Möglichkeit, einer Antriebsseite gezielt mehr Drehzahl oder Drehmoment zukommen zu lassen.
Das gelingt mit einem zusätzlichen Überlagerungsgetriebe; das Differenzial selbst kann dabei als offenes Differenzial, aber auch in anderer Form ausgeführt sein.
Wie hier im Bild zu erkennen ist, befindet sich links und rechts vom Differenzial die Überlagerungsstufe aus jeweils zwei Sonnenrädern und einem Hohlrad. Diese Überlagerungsstufe dreht sich um 10 % schneller als die Antriebswelle.
Eine Lamellenkupplung, die im Ölbad läuft und von einem elektrohydraulischen Aktuator betätigt wird, stellt den Kraftschluss zwischen der Welle und der Überlagerungsstufe her. Wenn die Kupplung schließt, zwingt sie dem Rad stufenlos die höhere Drehzahl der Überlagerungsstufe auf. Der Zwang, sich schneller zu drehen, führt dazu, dass das dafür notwendige zusätzliche Moment dem gegenüberliegenden kurveninneren Rad über das Differenzial entzogen wird. Auf diese Weise kann fast das komplette Drehmoment auf ein Rad fließen, Momentendifferenzen von bis zu 1800 Nm sind dabei möglich.
Das Torque-Vectoring-Differenzial agiert im Schubbetrieb genauso wirkungsvoll wie unter Last. Seine Regelung erfolgt elektronisch innerhalb weniger Hundertstelsekunden. Anhand von Lenkwinkel, Gierwinkel, Querbeschleunigung, Geschwindigkeit und weiteren Informationen errechnet das Steuergerät die ideale Verteilung der Kräfte für jede Fahrsituation blitzschnell und immer wieder neu.
Beim Anlenken oder Beschleunigen in der Kurve werden die Momente überwiegend zum kurvenäußeren Rad gelenkt – sie drücken das Auto in die Kurve hinein.
So wirkt das System der Tendenz zum Über- oder Untersteuern schon im Ansatz entgegen. Es entsteht ein sehr sportives Fahrgefühl, und die Dynamik des Fahrzeugs steigert sich spürbar.
Twinster von Getrag / GKN
Das Twinster-System aus dem Hause Getrag geht noch eine Stufe weiter. Mit einem Differenzial, das eigentlich ohne Differenzial auskommt! Angesichts dieser Tatsache könnte man es auch als Achsantrieb bezeichnen. Das Twinster-System gibt es in zwei Ausführungen. Im Ford Focus RS und dem Range Rover Evoque ist das Twinster-System für den Hang-on-Allrad schon in Serie.
Eine Variante für Frontantrieb steht kurz vor Markteinführung. Der Aufbau der Systeme an sich ist identisch, nur die Krafteinleitung findet über eine Trägerwelle statt.
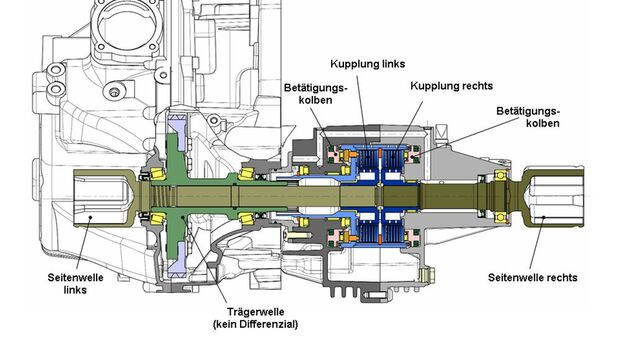
Durch den Entfall des Differenzials und die Momentenaufteilung ausschließlich über Kupplungen bieten sich einige Möglichkeiten, die selbst mit einem Überlagerungsdifferenzial (wie oben beschrieben) nicht möglich sind. Als Hang-on-Lösung entfällt beispielsweise eine Zwischenkupplung wie eine Visco oder Haldex – dies spart Gewicht. Die Verwendung von zwei Kupplungen erlaubt eine Regelung der Drehmomentverteilung zwischen Vorder- und Hinterachse (Längsverteilung), bei AWD-Systemen auch zwischen den Rädern der Antriebsachse (Querverteilung). Das Moment vom Getriebeausgang wird über die Kardanwelle oder die Trägerwelle in den Lamellenträger eingeleitet.
Die nassen Kupplungen sind fail-safe ausgelegt, also im unbetätigten Zustand offen. Aus Wirkungsgradgründen wurde bei der Schmierung der Kupplung auf eine separate Ölpumpe verzichtet. Diese Aufgabe wird von den Kupplungselementen selbst übernommen, indem der rotierende Außenlamellenträger das Öl im Sumpf aufnimmt und dies in eine Fangtasche im oberen Teil des Twinster-Gehäuses schleudert. Von hier aus fließt das Öl über Bohrungen zu den Innenlamellenträgern und wird mittels Nutzung der Fliehkraft durch das Lamellenpaket gedrückt. Dadurch stellt sich ein ständiger Ölfluss ein. Die Kupplungen werden hydraulisch und stufenlos über die Betätigungskolben angesteuert.
Dies hat den Vorteil, dass bei einseitig niedrigem Kraftschluss (μ-Split, Achsverschränkung) die Traktion verbessert wird. Da kein Differenzial verbaut ist und um Verspannmomente im Antrieb zu vermeiden, muss der bei Kurvenfahrt notwendige Drehzahlausgleich durch einen Kupplungsschlupf ausgeglichen werden. Dies regelt die Elektronik in weniger als 100 Millisekunden, vom Fahrer unbemerkt. Bei Geradeausfahrt können beide Kupplungen komplett geschlossen werden und fungieren in diesem Moment als Sperrdifferenzial. Dies stabilisiert das Fahrzeug und macht es unempfindlicher gegen Seitenwind. Zusätzlich kann das System "sehr früh" das auftretende Leistungsuntersteuern bei Kurvenfahrten durch ein zusätzliches Giermoment über die Kupplungen kompensieren. Des Weiteren ist es möglich, in sehr eng gefahrenen Kurven das kurveninnere Rad gänzlich ohne Moment rollen zu lassen. Somit kann das an diesem Rad zur Verfügung stehende Restkraftschlusspotenzial zur Seitenführung genutzt werden. Dies ist besonders dann günstig, wenn bei niedrigem Reibwert, wie etwa auf Schnee, gefahren wird. Auch in dynamischer Hinsicht hat das Twinster-Prinzip gegenüber offenen Differenzialen und selbst einem Torque-Vectoring-Differenzial mit Überlagerungseinheit noch Vorteile. Bei Fahrversuchen mit drei identischen Fahrzeugen selben Typs (Mini Cooper S, Typ R53), je einmal ausgestattet mit offenem Seriendifferenzial, mit einem Differenzial mit Überlagerungseinheit sowie dem Twinster-System, sollten Unterschiede ermittelt werden. Auf einer Kreisbahn mit konstantem Radius wurde dazu auf trockenem Asphalt langsam bis in den Grenzbereich beschleunigt und der Lenkwinkel in Abhängigkeit von der Querbeschleunigung gemessen.
Mit steigender Geschwindigkeit und Querbeschleunigung stieg der Lenkwinkel im Fahrzeug mit offenem Differenzial deutlich an, das Fahrzeug untersteuerte jedoch haltlos. Ist das Fahrzeug mit Überlagerungsdifferenzial ausgerüstet, ließ sich die Untersteuerneigung schon deutlich reduzieren. Erst mit dem Twinster-System konnte durch die komplett freie Momentenverteilung der Lenkwinkel nahezu konstant klein gehalten und so letztlich die höchste Kurvengeschwindigkeit wie auch Querbeschleunigung erzielt werden.
Fazit
Wer Traktion braucht, braucht ein Sperrdifferenzial. Doch der Fortschritt macht auch vor diesen ehemals grundmechanischen Bauteilen nicht halt. Die zunehmende Automatisierung und elektronische Steuerbarkeit dieser Bauteile hat dabei nicht nur positive Auswirkungen auf die Effizienz oder die Sicherheit, sondern letztlich auch auf den Fahrspaß. Trotz zunehmender Elektrifizierung der Fahrzeuge müssen Systemlieferanten wie Getrag interessante Lösungen für konventionelle Motoren parat haben, um am Ball zu bleiben. Innovative Allrad- und Antriebskonzepte, wie etwa Twinster, sind ein Schritt in die richtige Richtung.












